Transformations dans le plan (5)
3 La translation
3.1 Définition et Représentation
3.1.1 Définition
Soit u→ un vecteur. La transformation géométrique reliant chaque point M du plan au point M' tel que MM'→=u→ est appelée translation de vecteur u→ et est notée tu→.
Autrement dit: tu→(M)=M' signifie MM'→=u→.
3.1.2 Représentation graphique
Soit M un point et tu→(M)=M'.
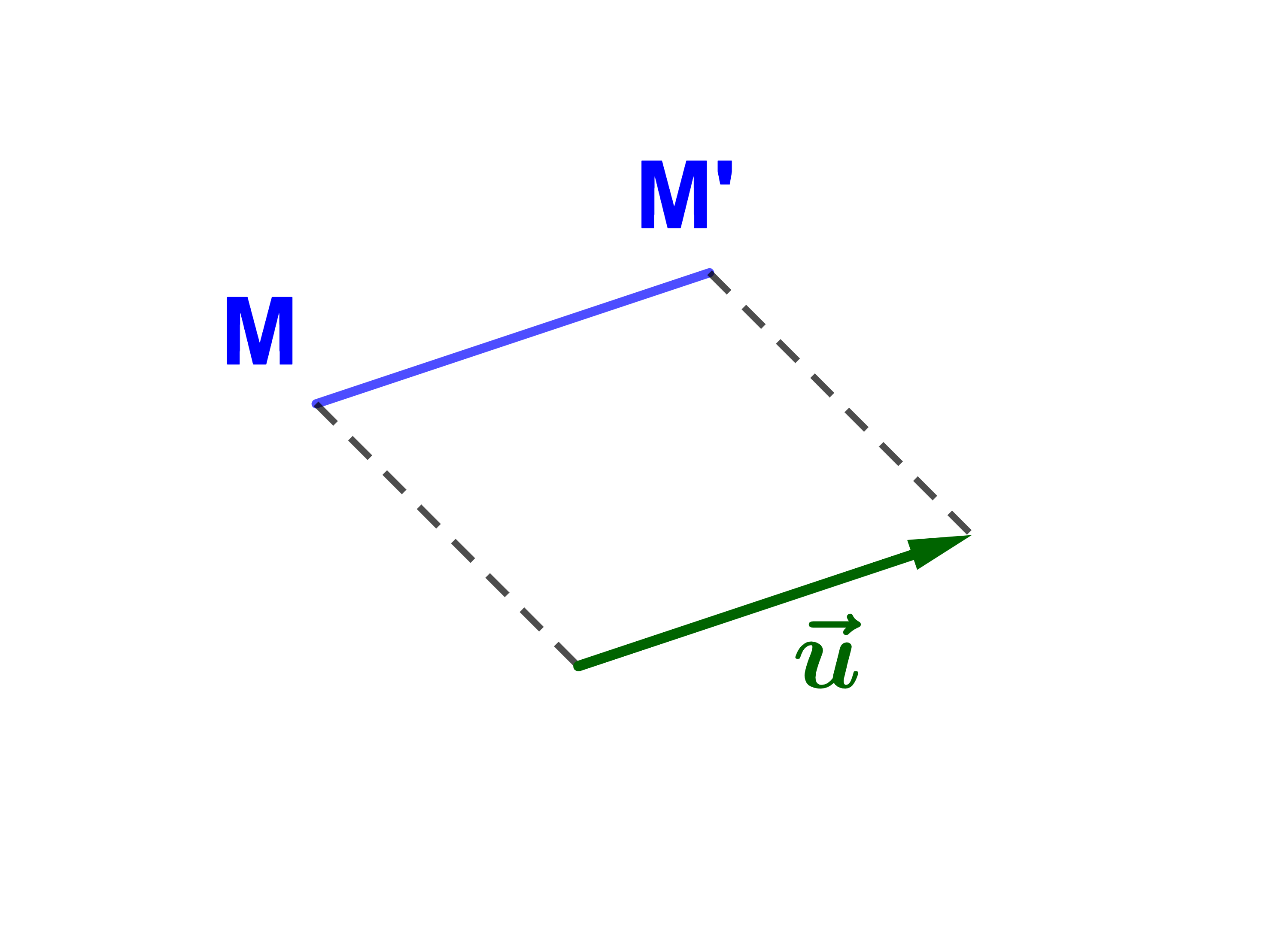
Remarque
Si u→=AB→ et tu→(M)=M' alors MM'BA est un parallélogramme.
Exercice 1 tp
Soit EFG un triangle.
Tracer l'image du triangle EFG par la translation
de vecteur 2FG→.
3.1.3 Propriété caractéristique d'une translation
Une transformation T est une translation si et seulement si
tous points M et N on a
M'N'→=MN→ tels que M'=T(M) et N'=T(N).
Exercice 2 tp
Soit EFGH un parallélogramme de centre O et T la transformation reliant chaque point M du plan au point M' tel que
MM'→-2ME→+MF→+MH→=O→.
1) Déterminer et tracer les points E'; F' et H' des images respectivement des points E ; F et H par T.
2) Montrer que la transformation T est une translation du vecteur u→=2OE→.
3.4 Conservation du coefficient de colinéarité de deux vecteurs
3.4.1 Introduction
1) Deux vecteurs u→ et v→sont colinéaires signifie qu'il existe un réel k tel que
v→=ku→.
2) Il existe trois points A ; B et C tels que
u→=AB→
et v→=AC→
Donc AC→=kAB→.
En utilisant la Propriété caractéristique de la translation on obtient
A'B→'=AB→ et A'C'→=AC→
ainsi A'C'→ = kA'B'→.
3.4.2 Propriété
La translation conserve le coefficient de colinéarité de deux vecteurs.
Résultat
La translation conserve l'alignement des points
et le milieu d'un segment.